TPC: Transformation-Specific Smoothing for Point Cloud Models
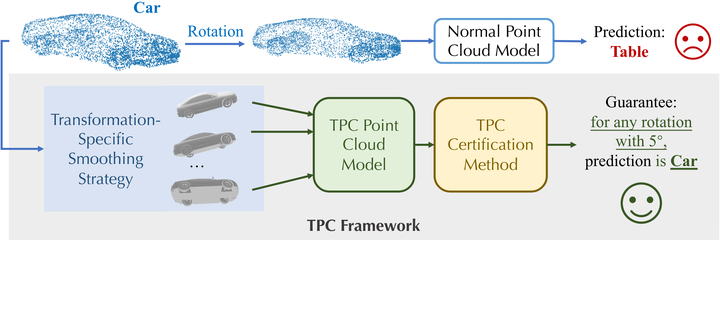 Overview of TPC framework. TPC includes smoothing and certification
strategies to provide certified robustness for point cloud models against semantic transformations. Besides
rotation as shown in figure, TPC provides strong robustness certification for a wide range of other semantic
transformations.
Overview of TPC framework. TPC includes smoothing and certification
strategies to provide certified robustness for point cloud models against semantic transformations. Besides
rotation as shown in figure, TPC provides strong robustness certification for a wide range of other semantic
transformations.
Abstract
Point cloud models with neural network architectures have achieved great success and been widely used in safety-critical applications, such as Lidar-based recognition systems in autonomous vehicles. However, such models are shown vulnerable against adversarial attacks which aim to apply stealthy semantic transformations such as rotation and tapering to mislead model predictions. In this paper, we propose a transformation-specific smoothing framework TPC, which provides tight and scalable robustness guarantees for point cloud models against semantic transformation attacks. We first categorize common 3D transformations into additive (e.g., shearing), composable (e.g., rotation), and indirectly composable (e.g., tapering), and we present generic robustness certification strategies for all categories respectively. We then specify unique certification protocols for a range of specific semantic transformations and their compositions. Extensive experiments on several common 3D transformations show that TPC significantly outperforms the state of the art. For example, our framework boosts the certified accuracy against twisting transformation along z-axis within 20 degree from 20.3% to 83.8%.